
Исследователи из Швейцарской высшей технической школы Цюриха (ETH Zurich) представили миниатюрного робота-ската, который плавает за счёт искусственных мышц, активируемых ультразвуком. Робот шириной всего 4 см не имеет батарей или проводов — его движение полностью контролируется дистанционно с помощью ультразвуковых импульсов, которые заставляют колебаться микропузырьки в его силиконовых мембранах.

Ключевой элемент технологии — силиконовые мембраны с микроскопическими порами, которые удерживают пузырьки воздуха. При воздействии ультразвука пузырьки начинают колебаться, заставляя мембрану изгибаться или совершать волнообразные движения, имитируя плавники настоящего ската. В зависимости от размера и расположения пузырьков можно программировать разные типы движения: от простого изгиба до сложных волновых паттернов.
Это показывает, что мы можем использовать микропузырьки для достижения не только простых движений, но и сложных паттернов, как у живого организма.
— пояснил руководитель проекта профессор Даниэль Ахмед.
Учёные уже продемонстрировали несколько практических применений технологии:
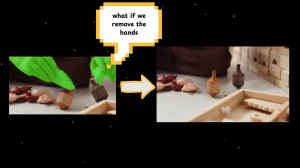
- Микро-захват для бережного манипулирования биологическими объектами — например, захват личинки рыбки данио без повреждений.
- Хирургический робот-колёсико, способный передвигаться в извилистом кишечнике свиньи.
- Ультразвуковые пластыри для точечной доставки лекарств в ткани.

В перспективе таких роботов-скатов можно будет использовать для неинвазивной диагностики и терапии в желудочно-кишечном тракте — например, доставляя препараты в нужный отдел кишечника без хирургического вмешательства.
Исследование, опубликованное в журнале Nature, открывает новые пути для создания мягких, управляемых на расстоянии медицинских микророботов, которые смогут работать внутри человеческого тела с минимальным риском.