

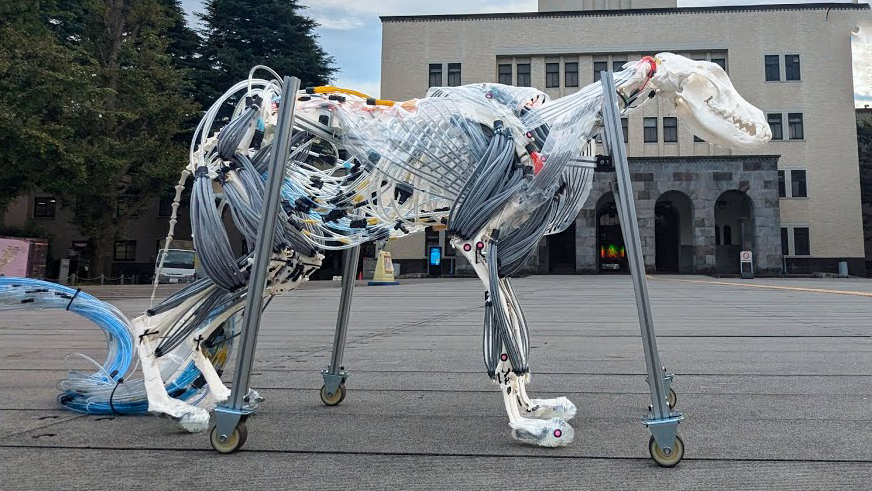
Японские инженеры представили необычного четвероногого робота, в конструкции которого отказались от привычных электродвигателей в пользу пневматических искусственных мышц, имитирующих биологическую мышечную систему. Этот подход, основанный на разработках ортопеда Джозефа Маккибена 1950-х годов, позволил максимально точно воспроизвести анатомию собаки. В частности, передние конечности робота крепятся к телу исключительно за счёт мышц, без жёстких суставных соединений, что увеличивает подвижность и длину шага.
В роботе используется 48 пневматических актуаторов: по 15 на каждую переднюю лапу и по 9 на задние. При подаче воздуха эти эластичные трубки в жёсткой оплётке сокращаются, подобно настоящим мышцам. На испытаниях робот продемонстрировал устойчивое движение по прямой, при этом последовательность активации мышц и характер движений были близки к естественным. Однако отсутствие пассивных стабилизирующих структур, таких как связки и суставные сумки, не позволяет ему пока самостоятельно удерживать вес тела — во время тестов робот опирался на вспомогательную тележку.
Разработчики планируют усовершенствовать конструкцию, добавив суставные элементы и мягкие ткани, что позволит роботу двигаться автономно. Также ведётся работа над оптимизацией пневмосистемы для повышения скорости реакции и ходьбы. Подобные мускульно-скелетные роботы важны не только для робототехники, но и для биомедицинских исследований — они могут помочь в изучении двигательной биомеханики и создании более естественных протезов. Ранее похожий подход показал польский стартап Clone Robotics, создавший анатомически точного человекоподобного робота, что указывает на формирование нового направления в робототехнике, стремящегося к биомиметическому совершенству.