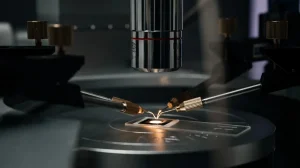

Инженеры из Princeton University разработали новый тип мягких роботов, в которых движение буквально «вшито» в сам материал. В отличие от традиционных конструкций, здесь нет ни двигателей, ни внешних насосов — вся механика заменена продуманной комбинацией полимеров и электроники. Основой технологии стал жидкокристаллический эластомер — материал с упорядоченной молекулярной структурой, который способен предсказуемо менять форму при нагреве. Исследователи использовали специализированный 3D-принтер, чтобы задать разные зоны с контролируемым направлением молекул. Эти участки работают как встроенные шарниры, изгибаясь строго в заданных местах при подаче тепла.
Такой подход позволяет отказаться от привычной сборки с отдельными механическими компонентами. Движение формируется сразу на этапе производства, а не добавляется позже. В конструкцию также интегрированы гибкие печатные платы, что делает систему более компактной и надёжной. Работа устройства строится на точечном нагреве. Встроенные схемы подают тепло в нужные зоны, вызывая локальное сокращение материала и, как следствие, движение. Дополнительно используются датчики температуры, которые обеспечивают обратную связь и позволяют системе корректировать свою работу в реальном времени.
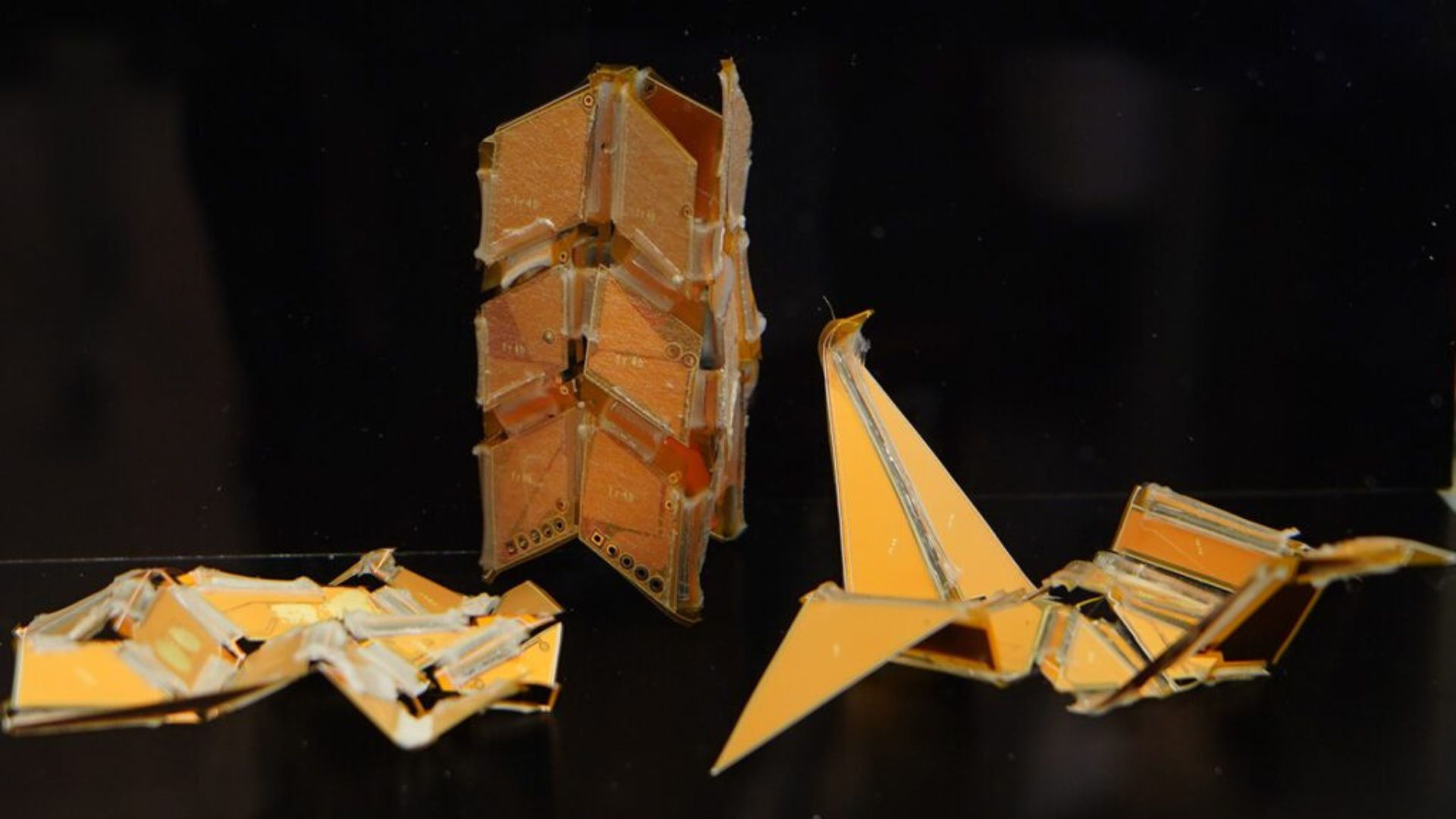
Для демонстрации возможностей команда создала робота в форме оригами-журавля, который способен многократно «махать крыльями» без заметного износа. Геометрия конструкции была рассчитана с использованием математических моделей, вдохновлённых оригами, что позволило добиться высокой точности движений. Разработка стала результатом междисциплинарной работы, начавшейся с дипломного проекта и выросшей в полноценную технологическую платформу. Исследователи подчёркивают, что ключевым достижением стала именно интеграция различных компонентов — материалов, электроники и алгоритмов управления — в единую систему.
По мнению команды, такие мягкие роботы могут стать основой для новых решений в медицине, где важны гибкость и безопасность, а также в условиях, где традиционные машины не справляются — например, в опасных или труднодоступных средах.
Результаты исследования опубликованы в журнале Advanced Functional Materials и уже рассматриваются как шаг к масштабируемому производству мягких роботизированных систем.